grasping

Grasping and manipulating objects is an important human skill. Since hand-object contact is fundamental to grasping, capturing it can lead to important insights. However, observing contact through external sensors is challenging because of occlusion and the complexity of the human hand. We present ContactDB, a novel dataset of contact maps for household objects that captures the rich hand-object contact that occurs during grasping, enabled by use of a thermal camera. Participants in our study grasped 3D printed objects with a post-grasp functional intent.
- Categories:
 189 Views
189 Views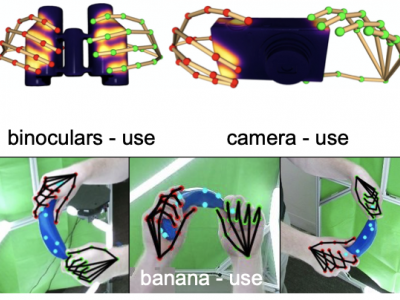
Grasping is natural for humans. However, it involves complex hand configurations and soft tissue deformation that can result in complicated regions of contact between the hand and the object. Understanding and modeling this contact can potentially improve hand models, AR/VR experiences, and robotic grasping. Yet, we currently lack datasets of hand-object contact paired with other data modalities, which is crucial for developing and evaluating contact modeling techniques. We introduce ContactPose, the first dataset of hand-object contact paired with hand pose, object pose, and RGB-D images.
- Categories:
607 Views
Deep learning has revolutionized the field of robotics. To deal with the lack of annotated training samples for learning deep models in robotics, Sim-to-Real transfer has been invented and widely used. However, such deep models trained in simulation environment typically do not transfer very well to the real world due to the challenging problem of “reality gap”. In response, this letter presents a conceptually new Digital Twin (DT)-CycleGAN framework by integrating the advantages of both DT methodology and the CycleGAN model so that the reality gap can be effectively bridged.
- Categories:
201 Views
The code is the sequence of prying grasp. The failure detection and recovery are included in the code.
- Categories:
69 Views