Given the difficulty to handle planetary data we provide downloadable files in PNG format from the missions Chang'E-3 and Chang'E-4. In addition to a set of scripts to do the conversion given a different PDS4 Dataset.
- Categories:
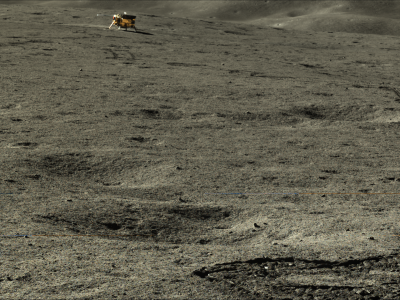
Given the difficulty to handle planetary data we provide downloadable files in PNG format from the missions Chang'E-3 and Chang'E-4. In addition to a set of scripts to do the conversion given a different PDS4 Dataset.

This dataset provides GPS, IMU, and wheel odometry readings on various terrains for the Pathfinder robot which is a lightweight, 4-wheeled, skid-steered, custom-built rover testbed platform. Rover uses a rocker system with a differential bar connected to the front wheels. Pathfinder is utilized with slick wheels to encounter more slippage. The IMU incorporated on the rover is an ADIS-16495 with 50Hz data rate. Pathfinder's quadrature encoders with 47,000 pulses/m resolution are used for wheel odometry readings with 10Hz data rate.