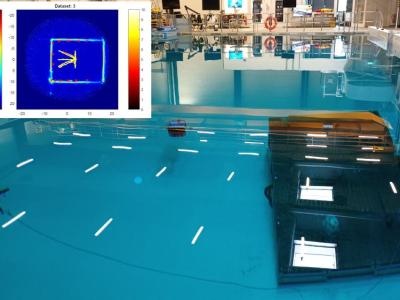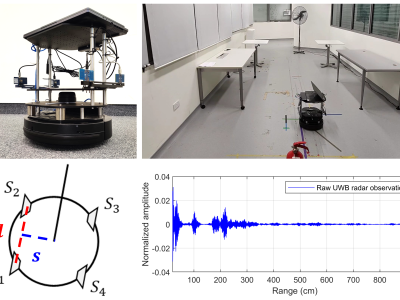
Ultra-wideband radar (UWB) is capable of perceiving the surroundings irrespective of the visibility due to its broad frequency spectrum. Therefore, UWB technology can be employed in mobile robots to perform simultaneous localization and mapping (SLAM) in vision-denied environments (e.g. smoke, fog, walls with reflective surfaces). We chose four different environments to teleoperate a TurtleBot2 nonholonomic robot equipped with Novelda X4M300 monostatic radar modules and RPLIDAR-A2 laser range scanner(s).
- Categories: