NIRPed
- Citation Author(s):
-
Xiaobiao Dai
 (Shaoyang University)
Yuxia Duan (Central South University)
(Shaoyang University)
Yuxia Duan (Central South University) - Submitted by:
- Xiaobiao Dai
- Last updated:
- DOI:
- 10.21227/262q-dk26
- Data Format:
 393 views
393 views
- Categories:
- Keywords:
Abstract
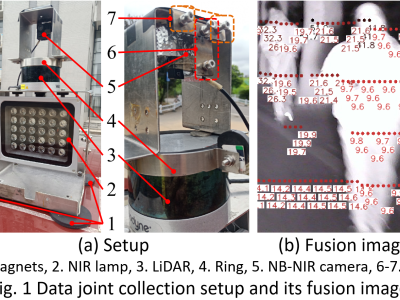
In nighttime driving scenes, due to insufficient and uneven lighting, and the scarcity of high-quality datasets, the miss rate of nighttime pedestrian detection (PD) is much higher than that of daytime. Vision-based distance detection (DD) has the advantages of low cost and good interpretability, but the existing methods have low precision, poor robustness, and the DD is mostly performed independently of PD. A narrowband near-infrared (NIR) camera and an NIR lamp to relieve the impact of noisy visible light (VIS) and improve imaging quality have been selected; a LiDAR to obtain distance information has been embedded in the system; a nighttime driving scene pedestrian and its distance joint detection dataset NIRPed has been built. The NIRPed includes 146k pedestrian annotations, which is 3 times that of NightOwls, the largest VIS nighttime pedestrian dataset. Based on Faster-RCNN, a joint PD and DD method using monocular imaging has been proposed. The proposed method realizes the joint detection of pedestrian and its distance on the NIRPed dataset with the PD log-average miss rate and DD mean absolute error rate of 6.5% and 5.5%, respectively. For comparison, the joint detection method was implemented on other large-scale VIS pedestrian datasets as well. Moreover, compared with the existing vision-based DD methods, the proposed method is less affected by pedestrian distance and height, exhibits higher accuracy and robustness, and satisfied the ISO requirements for intelligent transportation systems (absolute error rate<15%).
Instructions:
Download
For being compatible with the existing framework, NIRPed's annotations are provided in the MS-COCO format (JSON).
Data of NIRPed
PNG/JSON (Python)
Training images (60GB) /Training annotations (38MB)
Validation images (38GB) /Validation annotations (25MB)
Testing images (39GB) /Testing image information except annotations (9MB)
Data of miniNIRPed
PNG/JSON (Python)
Training images (284MB) /Training annotations (290KB)
Validation images (172MB) /Validation annotations (183KB)
Testing images (177MB) /Testing image information except annotations (40KB)
License
This dataset is made freely available to academic and non-academic entities for non-commercial purposes such as academic research, teaching, scientific publications, or personal experimentation. Permission is granted to use the data given that you agree:
That the dataset comes “AS IS”, without express or implied warranty. Although every effort has been made to ensure accuracy, we (Shaoyang University and Central South University) do not accept any responsibility for errors or omissions.
That you include a reference to the NIRPed Dataset in any work that makes use of the dataset.
That you do not distribute this dataset or modified versions. It is permissible to distribute derivative works in as far as they are abstract representations of this dataset (such as models trained on it or additional annotations that do not directly include any of our data) and do not allow to recover the dataset or something similar in character.
You may not use the dataset or any derivative work for commercial purposes such as, for example, licensing or selling the data, or using the data with a purpose to procure a commercial gain.
That all rights not expressly granted to you are reserved by us (Shaoyang University and Central South University).