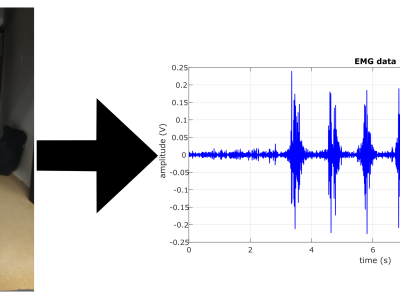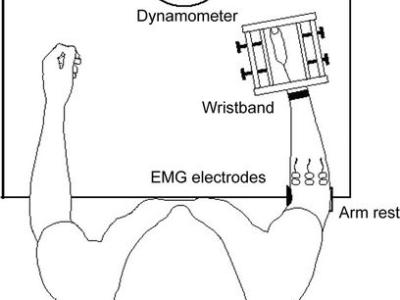
This data was recorded for emg based force/Torque estimation. EMG and torque signals were collected during simultaneous, isometric, but continuously varying contractions, corresponding to two wrist DoF. The experiment was carried out in two trials with a 5-min rest in between. Each trial included six combinations of tasks, separated by 2 min of rest to minimize the effect of fatigue. The performed tasks were categorized into individual and combined (simultaneous) DoF to test the ability to estimate isolated torque and torque in two simultaneous DoF.
- Categories: