Kinematics

We present a comprehensive dataset developed as part of a study to compute real-time kinematics using a full-body wearable approach incorporating up to 12 IMUs. This dataset includes optical and inertial measurements from 22 subjects engaged in a diverse set of 9 activities: walking, running, squatting, boxing, yoga, dance, badminton, stair climbing, and seated extremity exercises. The dataset features ground truth kinematics, offline predicted kinematics, online predicted kinematics, and IMU-simulated offline predicted kinematics.
- Categories:
 74 Views
74 Views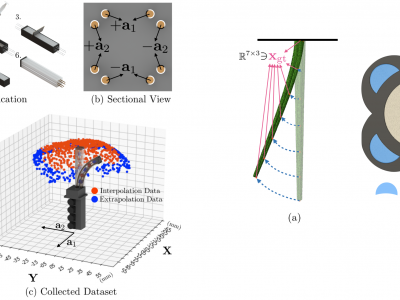
Soft robots are a promising area of research due to their potential use in various applications. Learning the kinematics of soft robots is crucial for their advancement and application. This dataset is designed to provide training data for the development of machine learning models that can learn the kinematics of soft robots with different actuation types. The dataset includes the positional data of three soft robots, specifically the simulated pneumatic soft robot, simulated tendon-driven soft robot, and real-world tendon-driven soft robot.
- Categories:
80 Views
Objective: Analyzing human motion is essential for diagnosing movement disorders and guiding rehabilitation for conditions like osteoarthritis, stroke, and Parkinson's disease. Optical motion capture systems are the standard for estimating kinematics, but the equipment is expensive and requires a predefined space. While wearable sensor systems can estimate kinematics in any environment, existing systems are generally less accurate than optical motion capture.
- Categories:
617 Views
Human Neck movements data acquired using Meatwear - CPRO device - Accelerometer-based Kinematic data. Data fed to OpenSim simulation software extracted Kinematics and Kinetics (Muscles, joints - Forces, Acceleration, Position)
- Categories:
354 Views