Haptics; Telemanipulation
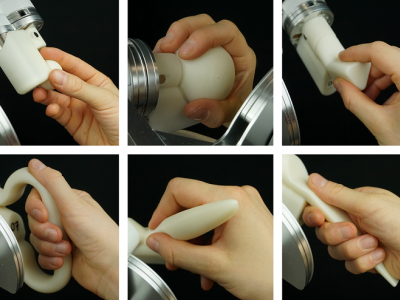
This dataset contains the 3D data of nine different grasp type handles that were developed specifically to investigate the influence of the telemanipulator handle on surgical teleoperation tasks with a customized, six degrees of freedom, handleless lambda.6 haptic device (Force Dimension, Nyon, Switzerland). Each of these handles is designed to be grasped with a different grasp type: power disk, quadpod, power sphere, tripod, precision disk, parallel extension, fixed hook, writing tripod, and adducted thumb.
- Categories:
 109 Views
109 Views