RSSI-based Passive Localization in the Wild, at Streetscape Scales
- Citation Author(s):
-
Fanchen Bao (Florida Atlantic University)Stepan Mazokha (Florida Atlantic University)Jason O. Hallstrom (Florida Atlantic University)
- Submitted by:
- Stepan Mazokha
- Last updated:
- DOI:
- 10.21227/bve7-4274
- Data Format:
 227 views
227 views
- Categories:
- Keywords:
Abstract
A modern Wi-Fi-enabled device (e.g., a smartphone) can spontaneously emit unencrypted and anonymized signals to the environment in search of an access point. This signal is called a probe request. Since it is freely available in the open air, one can build a sensor from a Wi-Fi adapter to capture the signal. Once captured, its signal strength can be measured in the form of a Received Signal Strength Indicator (RSSI).
RSSI is usually represented as a negative value in the unit of `dBm`. In theory, RSSI measurements are correlated with distance (the closer the Wi-Fi-enabled device is to a sensor, the larger the RSSI measurements). Thus, if multiple sensors are present near a Wi-Fi-enabled device when it emits probe requests, it is theoretically possible to predict the device's location based on statistical modeling of the RSSI measurements. And since smartphones are ubiquitous these days among pedestrians, RSSI-based localization via probe requests becomes a strong candidate for studying pedestrian mobility patterns on a city street in a low-cost, non-intrusive, and privacy-centric manner.
However, due to the fluctuating nature of RSSI measurements (RSSI can be affected by myriads of environmental factors such as humidity, obstruction, multi-path, interference, time, power variation, etc.), it is not trivial to model their behavior concerning device locations. In the literature, we have seen that past researchers had to build their own sensors and testbeds to evaluate new modeling ideas. This process is time-consuming and usually restricted to a controlled or small-scale outdoor environment. Neither is ideal to reveal the true performance of their models. It will benefit the research community if a dataset dedicated to real-world RSSI-based passive outdoor localization is publicly available. Unfortunately, to the best of our knowledge, such a dataset did not exist.
Not anymore! Here we present the West Palm Beach (WPB) dataset, whose sole purpose is for researchers to play with RSSI and location data collected in a real-world setting. We hope this dataset will allow faster iteration of model evaluation and benchmarking and invite more brainpower to tackle the RSSI-based passive outdoor localization problem.
Instructions:
The data itself is contained in the wpb_dataset.zip file, which consists of nine CSV files. Each file's name represents the date when the data was collected. In total, 863,344 probe requests were collected throughout the data collection.
We recommend that one use the data collected on 2022-11-19 as test data because only one round of probe request emission was carried out at each RP. On all the other eight days, three rounds of probe request emissions took place at each RP.
The Meaning of Each Column
- x: the distance between the RP and the nearest sensor to the West. This distance was measured and can be used as ground truth for modeling.
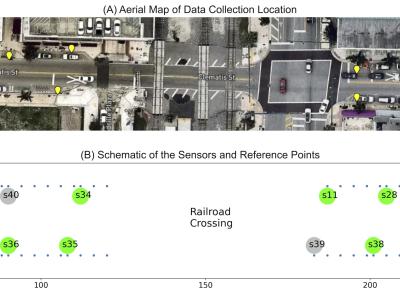
- sidewalk_x: the distance between the RP and the West-most sensor on the sidewalk (s57 for the 500 block North, s22 for the 500 block South, s11 for the 400 block North, and s39 for the 400 block South). This distance was measured and can be used as ground truth for modeling.
- overall_x: the distance between the RP and the West-most sensor of the 500 block (s57 for North and s22 for South). This distance is estimated as the width of the railroad crossing was not measured. We use it purely for visualization purposes.
- y: the "y-coordinate" of an RP. All RPs on the North have y value of 15, and all on the South have y value of 0. As explained before, the y-coordinate of an RP is meaningless; we use it purely for visualization purposes.
- class: an indicator whether the RP is on the North or South sidewalk. 1 = North, 0 = South.
- emitter: the ID of the emitter that sent the probe request. Three emitters were used, with IDs 9, 29, and 30.
- lamp_post: the index of the lamp post/sensor nearest to the RP on the West (i.e., the lamp post/sensor from which an RP computes the x value). The index starts from 0 on each sidewalk from the West and increases towards the East. For instance, s57 has index 0 and s34 has index 6; s39 has index 0 and s25 has index 6.
- city_block: the label for the city block where the RP resides. It has only two values: 500 or 400.
- label: the label for each round of probe request emission. All the rows (i.e., probe requests) that share the same label were emitted in the same 20-second round.
- timestamp: the timestamp of the starting time of each round of probe request emission. Note that all the rows that share the same timestamp also have the same label and that the timestamp does not record the time of each probe request but just the beginning of the emission round. That said, all the rows sharing the same timestamp are sorted in increasing chronological order.