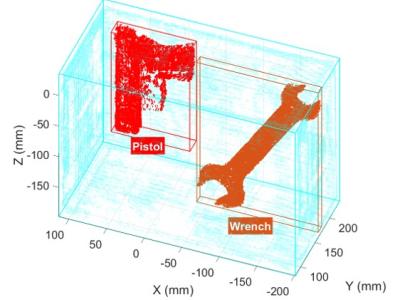
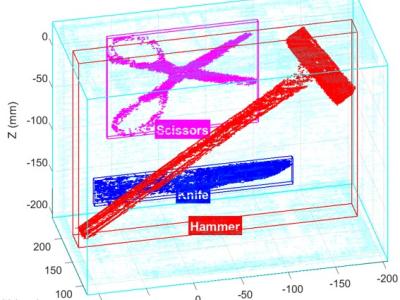
Rotated reconstructed 3D imaging results
- Citation Author(s):
-
Yaheng Wang
- Submitted by:
- Yaheng Wang
- Last updated:
- DOI:
- 10.21227/aqcq-6552
 112 views
112 views
- Categories:
- Keywords:
Abstract
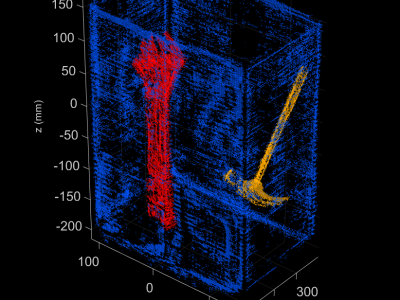
Supplementary material of the article "Precise 2D and 3D fluoroscopic Imaging by using an FMCW Millimeter-Wave Radar".
A wrench, and a hammer were packed inside a cardboard box as an imaging sample, to ensure stability, foam cushioning material was used to fix the tools within the boxes. We conducted object scanning from four distinct directions at 90-degree intervals. The acquired data was then reconstructed, and the results from each direction were stitched together, considering the respective scanning angles. This supplementary material shows the reconstructed 3D point cloud image, the red point cloud is the wrench, the orange point cloud is the hammer, and the blue point cloud represents the front and back of the box.
Instructions:
Supplementary material of the article "Precise 2D and 3D fluoroscopic Imaging by using an FMCW Millimeter-Wave Radar".