Lower limb joint angular position and ground contact data from healthy subjects doning a decoupled exoskeleton
- Citation Author(s):
-
Rafael Mendoza (Tecnologico de Monterrey)Diego Torricelli (Cajal Institute)Joel Carlos Huegel (Tecnologico de Monterrey, MIT Media Lab, Center for Extreme Bionics)Jose Luis Gordillo (Tecnologico de Monterrey)Jose Luis Pons (Cajal Institute)Rogelio Soto (Tecnologico de Monterrey)
- Submitted by:
- Rafael Mendoza Crespo
- Last updated:
- DOI:
- 10.21227/nawf-tg74
- Data Format:
- Links:
 517 views
517 views
- Categories:
- Keywords:
Abstract
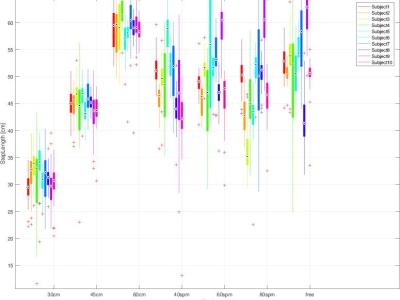
A human-user study with ten healthy subjects provides this experimental setup. The experimental protocol consists in capturing kinematic data while subjects walk, with the donned H2 lower-limb exoskeleton, across seven experimental conditions: Subjects completed 7 trials each. There were 7 different trials, 3 with marks every 30, 45 and 60 cm on 3 separate 10 meter lanes. The following 3 trials were run with audible markers by a digital metronome all run in 10 meter lanes with no visual markers and the last trial was to walk freely on the same lane as last ones without restrictions but the distance. Captured data include angular position on saggital plane of hip, knee and ankle joints of both legs . Magnitud of Force (FRS) sensors for Heel Strike and Toe Off of both legs and ground contact sensors for HS and TO for both legs. The computed ankle trajectories in the sagittal plane were found by normalizing all trials of each test from one heel strike to the next heel strike independent of the specific gait features ofeach individual.
Instructions:
Count is the sample data counter
RH_POS is the Right Hip joint angular position,
RK_POS is the Right Knee joint angular position,
RA_POS is the Right Ankle joint angular position,
LH_POS is the Left Hip joint angular position,
LK_POS is the Left Knee joint angular position,
LA_POS is the Left Ankle joint angular position,
R_FRS_HS is the Right FRS (Force sensor) for Heel Strike,
R_FRS_TO is the Right FRS (Force sensor) for Toe Off,
L_FRS_HS is the Left FRS (Force sensor) for Heel Strike,
L_FRS_TO is the Left FRS (Force sensor) for Toe Off,
RA_HS is the Right contact to ground sensor for Heel Strike,
RA_TO is the Right contact to ground sensor for Toe Off,
LA_HS is the Left contact to ground sensor for Heel Strike,
LA_TO is the Left contact to ground sensor for Toe Off,