Evaluation of a Smart Mobile Robotic System for Industrial Plant Inspection and Supervision
- Citation Author(s):
-
Georg Kurt johannes Fischer
 Max Bergau
D. Adriana Gómez-Rosal
Andreas Lars Wachaja
Johannes Michael Berthold Graeter
Matthias Odenweller,Uwe Piechottka
Fabian Höflinger
Nikhil Gosala
Daniel Büscher
Abhinav Valada
Wolfram Burgard
Max Bergau
D. Adriana Gómez-Rosal
Andreas Lars Wachaja
Johannes Michael Berthold Graeter
Matthias Odenweller,Uwe Piechottka
Fabian Höflinger
Nikhil Gosala
Daniel Büscher
Abhinav Valada
Wolfram Burgard
- Submitted by:
- Georg Fischer
- Last updated:
- DOI:
- 10.21227/4ms5-rs57
- Data Format:
 330 views
330 views
- Categories:
- Keywords:
Abstract
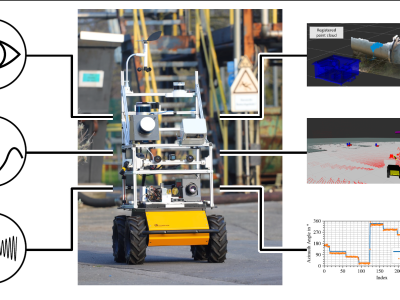
Automated and autonomous industrial inspection is a longstanding research field, driven by the necessity to enhance safety and efficiency within industrial settings. In addressing this need, we introduce an autonomously navigating robotic system designed for comprehensive plant inspection. This innovative system comprises a robotic platform equipped with a diverse array of sensors integrated to facilitate the detection of various process and infrastructure parameters. These sensors encompass optical (LiDAR, Stereo, UV/IR/RGB cameras), olfactory (electronic nose), and acoustic (microphone array) capabilities, enabling the identification of factors such as methane leaks, flow rates, and infrastructural anomalies.
The proposed system underwent individual evaluation at a wastewater treatment site within a chemical plant, providing a practical and challenging environment for testing. The evaluation process encompassed key aspects such as object detection, 3D localization, and path planning. Furthermore, specific evaluations were conducted for optical methane leak detection and localization, as well as acoustic assessments focusing on pump equipment and gas leak localization.
Instructions:
The Dataset is a mp4 video packed into a .zip file. Use the e.g. VLC player to replay it.







