Dijkstra_3d_path
- Citation Author(s):
-
Gabriel Castro
- Submitted by:
- Gabriel Castro
- Last updated:
- DOI:
- 10.21227/5re6-ep10
- Data Format:
- Research Article Link:
 244 views
244 views
- Categories:
Abstract
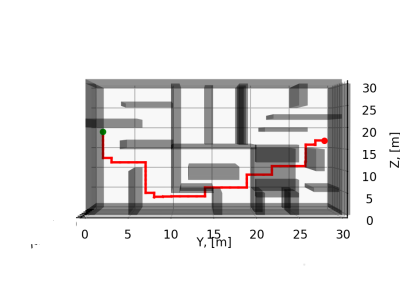
This dataset presents a collection of coordinates that belongs to paths generated with a 3D disjstkra algorithm,in diferents enviroments,with a grid size equal to one. The output is a six dimension vector that represents the action taken by the agent (z+,z-,y+,y-,x+,x-) based on his pose, sensors readings and the target.
Instructions:
This dataset was apply to train a Deep Neural Network to mimic the 3D Dijkstra path planning algorithm in a online and unknown enviroment. If you want to train a network to do something similar to this, its important to first shuffle data and then use cross validation or other technique during the train phase.
Another important information is that the moviment and sensors reading tables are binary vectors with six dimension. Where:
(choque0,choque1,choque2,choque3,choque4,choque5) --> (z+,z-,y+,y-,x+,x-) ex : (0,1,0,1,0,0) -- Means that in z- and y- are non free paths, and the others directions are free collision.
(acao0,acao1,acao2,acao3,acao4,acao5) --> (z+,z-,y+,y-,x+,x-) ex :(0,1,0,0,0,0) -- Means that the algorithm takes the decision to go to z- direction based on pose(h --> x, f --> y, g-->z ), target(alvo_x,alvo_y,alvo_z) and sensorsv (choque0,....,choque5) tables.






