Datasets
Standard Dataset
Current control process for adaptive and dexterous underactuated fingers
- Citation Author(s):
- Submitted by:
- Chuan Zhao
- Last updated:
- Wed, 09/27/2023 - 03:24
- DOI:
- 10.21227/b1pb-wt84
- Data Format:
- License:
 150 Views
150 Views- Categories:
- Keywords:
Abstract
To address the current problem of decoupling between joints and the fixed synergy relationship of underactuated fingers, an adaptive and dexterous underactuated finger named the LMH finger was designed in this paper. The LMH finger has two degrees of actuation (DOAs) and three degrees of freedom (DOFs) based on the predefined elastic force (PEF) gradient, which actively changes the joint coupling relationship and synergistic control structure. With the changes in the driving forces and external forces, the LMH finger is used to establish three conditional synergistic control (CSC) laws for the mutual transformation of adaptivity and dexterity. With a double tendon-pulleyed winding mechanism and a PEF gradient, the LMH finger provides three single-joint independent motion modes and four multi-joint synergistic motion modes in a simple differential control of double driving forces. To improve the antagonistic control ability of bending and extension and the enveloping ability, the crank-slider and crank-rocker mechanisms of the LMH finger provide a force synergy mechanism and a continuous contact surface for replaceable modules. Depending on the control conditions of driving forces, external forces and PEFs, the LMH finger can approximately achieve the dexterity of human fingers in the pre-grasping stage and adaptivity in the grasping stage. Finally, the CSC method and the design paradigm are successfully applied to a 2-DOAs and 6-DOFs underactuated two-fingered hand for symmetric and asymmetric dexterous manipulations, which verifies the improvement in the grasping adaptability and manipulative dexterity.
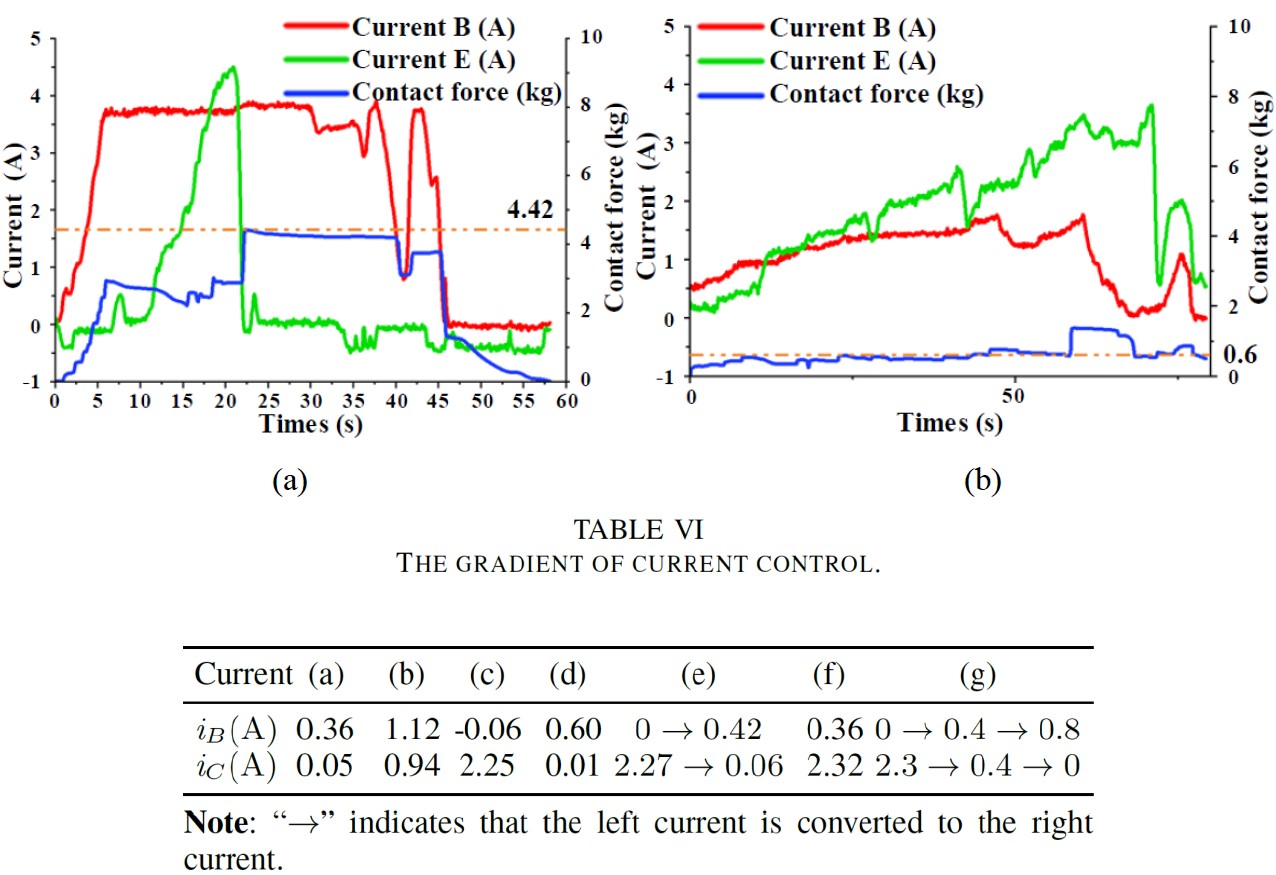
To prove the force and motion control capabilities of the LMH finger, we demonstrate the maximum fingertip force and constant force control capabilities of fingertip linear motion through the current-pressure in Figures (a) and (b). Different movement modes of the fingers are also controlled through the current control synergy relationship in Table VI. The current control gradient of each movement mode is a range value, and Table VI only provides one of the current control gradients.
- Data file 1: the LMH finger drives the fingertip pressure sensor with the maximum resistance arm, and the measured current and fingertip pressure changes are shown in (a). The maximum output force of motor B is 4.42 kg, with a 4.2 A current in a single finger. The synergistic control relationship between tendon B and tendon E at the DIP joint is verified. The black plate is fixed with the pressure end of pressure sensor. The LMH finger is controlled by two motors synergistically to complete the fingertip-pressing motion in a straight line on the plate. Although the pressure curve in Fig. (b) displays a local mutation due to the limited accuracy of manual control, this experiment shows that the fingertip motion control process can simultaneously maintain the stability of positive pressure. Fig. (a) and Fig. (b) verify the control relationship between currents and forces and the compliant control of the current difference, respectively.
- Data file 2 shows the control currents of current B and current E for 7 motion modes. The current control gradient can be obtained by generating a current-schedule. The differential control relationship between current B and current E represents the control method of the corresponding finger movement mode.
Dataset Files
- Current control for maximum driving force of fingertip pressing and current control for fingertip slippage The relationship between fingertip pressure and current control.xls (206.00 kB)
- Dual motor current control gradients for seven motion modes of DIP, PIP, MCP, PIP-DIP, MCP-DIP, PIP-MCP and MCP-PIP-DIP. Dual motor current control gradient for 7 motion modes.xlsx (62.40 kB)






Comments
We will continue to improve relevant research in the future.