Datasets
Standard Dataset
comparation of calibration data_2024
- Citation Author(s):
-
XiaomingHuang

- Submitted by:
- Xiaoming Huang
- Last updated:
- Mon, 09/02/2024 - 23:14
- DOI:
- 10.21227/yxz0-ct06
- License:
 303 Views
303 Views- Categories:
- Keywords:
Abstract
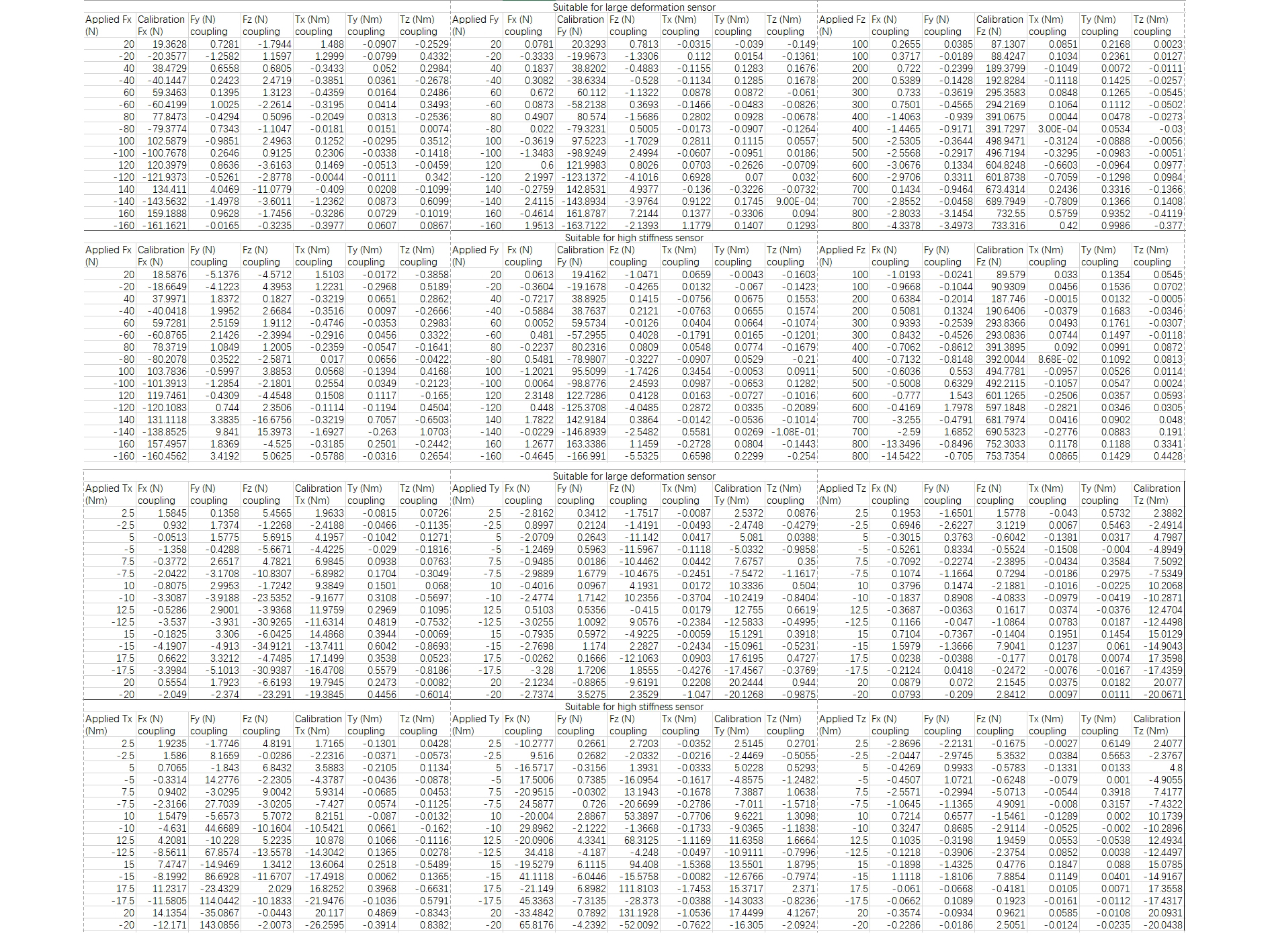
Calibration comparison data, including data obtained by calibrating the large deformation sensor using the proposed calibration device suitable for large deformation six-dimensional force sensors, and data obtained by calibrating the same large deformation six-dimensional force sensor using the calibration device suitable for high rigidity six-dimensional force sensors. Each of the worksheets in the image lists the data corresponding to the different channels of the large deformation six-dimensional force sensor, including the applied force or moment, the calibrated force acquired in the corresponding direction, and the coupled force or moment generated in other non-calibrated directions. For the acquired calibration data, the meaning of each column is clearly indicated for easy reference.
Calibration comparison data including data obtained by calibrating the large deformation sensor using the proposed calibration device applicable to the large deformation six-dimensional force sensor, and data obtained by calibrating the same large deformation six-dimensional force sensor using the calibration device applicable to the high rigidity six-dimensional force sensor. The top and bottom of the picture are divided into four large compartments, the first large compartment being the calibration data applicable to the calibration device of the large deformation six-dimensional force sensor for force, the second large compartment being the calibration data applicable to the calibration device of the high rigidity six-dimensional force sensor for force; the third large compartment being the calibration data applicable to the calibration device of the large deformation six-dimensional force sensor for torque, and the fourth large compartment being the calibration data applicable to the calibration device of the high rigidity six-dimensional force sensor for torque.





