First Name
Kosisochukwu
Last Name
Nnoli
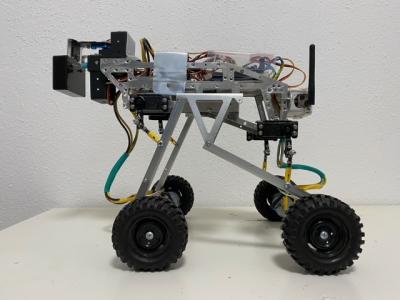
This paper introduces an edge-controlled autonomous robot with a gyro-stabilized active suspension system in form of a hybrid quadrupedal wheel drive mechanism, capable of detecting free pathways with an angular resolution of 1 degree and steering the robot in that direction. This features the computer-aided prototyping of the robot as a complete multisensory mechatronic system. Also, several algorithmic models were used in developing the robot’s software, which includes suspension control and pathfinding algorithms.
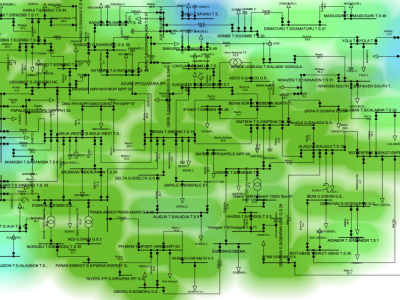
This a supplementary material for the IEEE Conference Paper - A Dynamic Model of Realistic Nigerian 330 kV Transmission Network: A Catalyst to Realistic Grid Studies and Expansion Strategy.
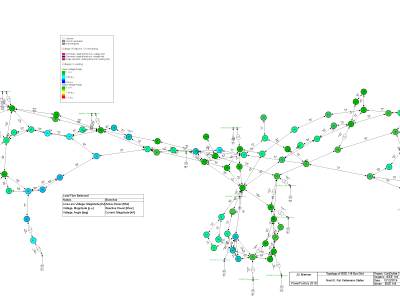
This is the supplementary material for the paper "Spreading of Disturbances in Realistic Models of Transmission Grids: Dependence on Topology, Inertia and Heterogeneity".