Datasets & Competitions
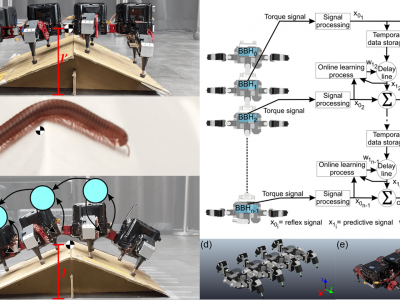
Typically, control strategies for legged robots have been developed to adapt their leg movements to deal with complex terrain. When the legs are extended in search of ground contact to support the robot body, this can result in the center of gravity (CoG) being raised higher from the ground and can lead to unstable locomotion if it deviates from the support polygon. An alternative approach is body adaptation, inspired by millipede/centipede locomotion behavior, which can result in low ground clearance and stable locomotion.
- Categories:
 224 Views
224 Views