First Name
Andrejs
Last Name
Zujevs
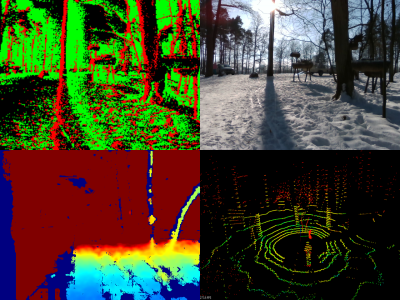
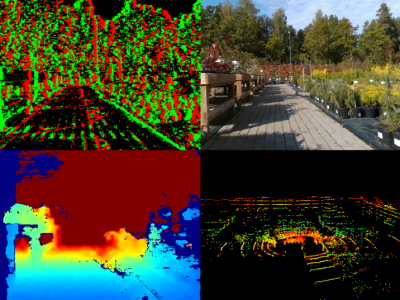
A new generation of computer vision, namely event-based or neuromorphic vision, provides a new paradigm for capturing visual data and the way such data is processed. Event-based vision is a state-of-art technology of robot vision. It is particularly promising for use in both mobile robots and drones for visual navigation tasks. Due to a highly novel type of visual sensors used in event-based vision, only a few datasets aimed at visual navigation tasks are publicly available.
A new generation of computer vision, namely event-based or neuromorphic vision, provides a new paradigm for capturing visual data and the way such data is processed. Event-based vision is a state-of-art technology of robot vision. It is particularly promising for use in both mobile robots and drones for visual navigation tasks. Due to a highly novel type of visual sensors used in event-based vision, only a few datasets aimed at visual navigation tasks are publicly available.