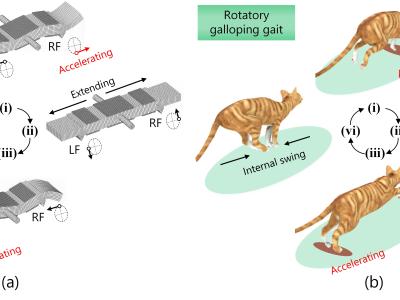
Development of an untethered ultrasonic robot with fast and load-carriable movement imitating rotatory galloping gait (i) At t = nTp [where n is an integer and Tp (= 1/f) is the period], the LF’s longitudinal vibration velocity and bending vibration displacement reach the peak values along the −x and +z axes, respectively. Categories: Other