Datasets
Open Access
Supplementary Material To: A Unified Perception Benchmark for Capacitive Proximity Sensing Towards Safe Human-Robot Collaboration (HRC)
- Citation Author(s):
-
SerkanErgun
 Klagenfurt UniversityYitaoDingChemnitz University of TechnologyHosamAlagiKarlsruhe Institute of TechnologyChristianSchöffmannKlagenfurt UniversityBarnabaUbezioJoanneum Research RoboticsStephanMühlbacher-KarrerJoanneum Research RoboticsHubertZanglKlagenfurt University
Klagenfurt UniversityYitaoDingChemnitz University of TechnologyHosamAlagiKarlsruhe Institute of TechnologyChristianSchöffmannKlagenfurt UniversityBarnabaUbezioJoanneum Research RoboticsStephanMühlbacher-KarrerJoanneum Research RoboticsHubertZanglKlagenfurt University - Submitted by:
- Serkan Ergun
- Last updated:
- Wed, 03/24/2021 - 03:45
- DOI:
- 10.21227/r8hc-4z50
- Data Format:
- License:
 411 Views
411 Views- Categories:
- Keywords:
Abstract
Supplementary Material To: A Unified Perception Benchmark for Capacitive Proximity Sensing Towards Safe Human-Robot Collaboration (HRC)
-- Accepted for presentation at IEEE International Conference on Robotics and Automation (ICRA), 2021 Xi'an, China
-- Final formal acceptance pending
-- Conference proceedings pending
Paper Abstract:
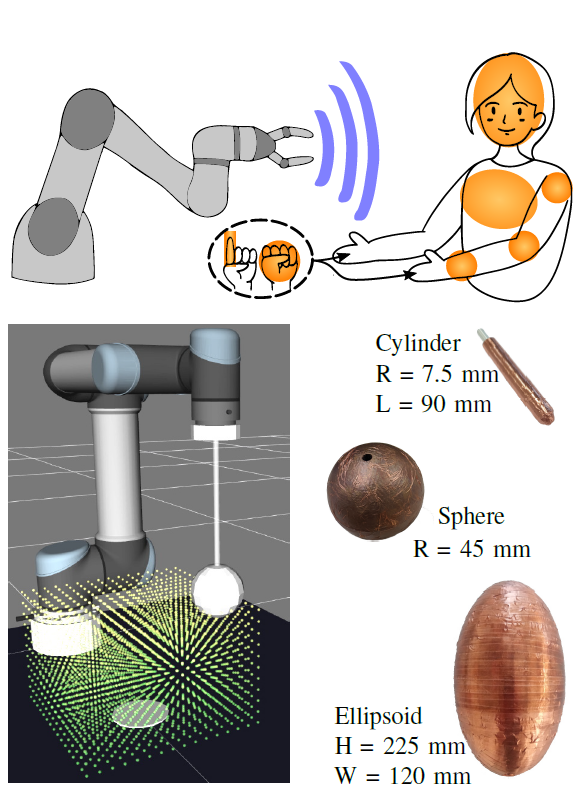
During the co-presence of human workers and robots, measures are required to avoid injuries from undesired contacts. Capacitive Proximity Sensors (CPSs) offer a costeffective solution to cover the entire robot manipulator with fast close-range perception for HRC tasks, closing the perception gap between tactile detection and mid-range perception. CPSs do not suffer from occlusion and compared to pure tactile or force sensing, they react earlier and allow increasing the operating speed of Collaborative Robots (Cobots) while still maintaining safety. However, since capacitive coupling to obstacles varies with their distance, shape and material properties, the projection from capacitance to actual distances is a general problem. In this work, we propose an universal benchmark test procedure for fellow researchers to evaluate their CPSs. Considering ISO/TS 15066 for Power and Force Limiting (PFL) as a reference, we derive the requirements for the specified body regions and propose a method for determining the operation speed to comply with PFL based on a pre-defined detection threshold. Finally, the benchmark test procedure is evaluated on three different concepts of CPSs from the contributed researchers, demonstrating the general applicability.
This paper has been accepted for potential presentation and inclusion in the conference proceedings at IEEE ICRA 2021. Further supplementary material will be published upon final acceptance to ICRA 2021.
--------------------------------------------
A pre-print version of the paper may be found here:
https://www.researchgate.net/publication/350097869_A_Unified_Perception_...
-----
The link to the conference proceedings will be attached, as soon as the conference proceedings have been published
--------------------------------------------
For further information feel free to contact us at:
Serkan Ergun
Institute for Smart Systems Technologies - Sensors and Actuators Group
Klagenfurt Univeristy
Universitätsstrasse 65-67,
A- 9020 Klagenfurt
E- Mail:
****Test Objects****
The test objects used in this work can be found in "test_objects.zip". They are avaibale as STL files. Test objects "sphere" and "ellipsoid" are made out of two separate files each.
Each test objects has one ore more sockets to fit a 12 mm tube (outer diameter) to mount the test objects. You may find such tubes in your local hardware store, or print them as well. A *.stl of the file is not included.
Additional Notes:
- You may use general purpose glue to combine separate parts of the test objects.
- When covering your test object with copper foil, make sure to use conductive adhesive
****Sensing directivity measurements****
Short hand notation
AAU / JR.. Klagenfurt Univeristy & Joanneum Research Robotics
KIT... Karlsruhe Institute of Technology
TUC... Chemnitz University of Technology
Each file (except spatial resolution and grounding measurement by KIT) is structured as follows:
- Columns 1 to 3 represent the Cartesian Coordinates of the lowest point (in height (z)) of the test object with respect to the center of the electrode
- Column 4 shows the average of measurements conducted in 10 ms calibrated by the baseline value
- Column 5 shows the standard deviation of 500 measurements at each point
- Column 6 and 7 represent basline value and baseline standard deviation (by the same means as for Column 5-6) respectively. (AAU/JR recorded the baseline value at 40 cm (this is why that value is constant for the whole column))
- Column 8 indicates if that point was detected by means explained in Section IV - A of the paper
--AAU/JR--
File: Results_AAU/JR.zip
Contains results of the sphere and cylinder
- test_object_sphere_aau.txt
- test_object_cylinder_aau.txt
Measurements of the ellipsoid will be posted soon.
--KIT--
File: Results_KIT.zip
Contains results of the sphere for three different electrode configuration of 21cm², 42cm² and 84 cm²
- kit_sphere_21qcm.txt
- kit_sphere_42qcm.txt
- kit_sphere_21qcm.txt
Additionally contains analysis of different groundings and spatial resolution (see section VI.B of the paper) respectively.
- kit_different_grounding_42qcm.txt
- kit_spatial_resolution_42qcm.txt
These measurements were conducted using the "sphere" and an active electrode size of 42 cm², the files are structured as follows:
- Column 1 gives the z coordinate,
- Column 2 to 4 show the values for signal/spatial resolution 1.5 kOhm, 1.5 kOhm and 100 pF and 0 Ohm (hard grounding) respectively.
--TUC--
File: Results_TUC.zip
Contains results of the sphere:
- sphere_tuc.txt
Dataset Files
 test_objects.zip test_objects.zip (269.33 kB)
test_objects.zip test_objects.zip (269.33 kB)- Results_TUC.zip TUC.zip (51.19 kB)
- Results_KIT.zip KIT.zip (427.08 kB)
- Results_AAU/JR.zip AAU_JR.zip (105.75 kB)
Open Access dataset files are accessible to all logged in users. Don't have a login? Create a free IEEE account. IEEE Membership is not required.





