Datasets
Standard Dataset
Deep Learning–Based Autonomous Excavation: A Bucket-Trajectory Planning Algorithm

- Citation Author(s):
-
JAEMYUNGHUH
 KOREA UNIVERSITY
KOREA UNIVERSITY - Submitted by:
- JAEMYUNG HUH
- Last updated:
- Wed, 02/22/2023 - 08:03
- DOI:
- 10.21227/7pbs-y780
- Data Format:
- License:
 161 Views
161 Views- Categories:
- Keywords:
Abstract
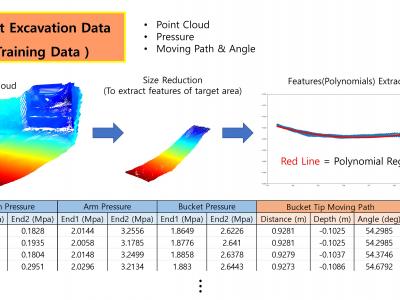
The increased risk to the safety of excavator personnel and difficulty in training them, combined with a manpower shortage, have led to an increased demand for machine automation. This study applies a long short-term memory algorithm for automating a bucket-tip trajectory planning AI system. Unlike other autonomous excavation techniques, the proposed approach in this study performs the bucket-trajectory planning of the excavator without prior knowledge of nonlinear bucket–soil interaction dynamics during excavation, which requires precise adjustment of parameters with the heuristic analysis of correlation between them. Based on data acquisition from excavation of excavator experts, this method uses the three-dimensional point cloud of terrain and bucket motion data in excavation process for training and application of the AI. Especially, we transform the point cloud, which comprises massive number of points and increases the computation complexity, into the much smaller number of values, which are sufficient for representing the three-dimensional shape of target terrain. To ensure safety against collision with underground obstacles, a collision avoidance algorithm is applied to prevent crashes during excavations along the given path, based on continuous monitoring of the pressure in the excavator’s hydraulic cylinder. Comparative experiments reveal that the bucket-tip trajectory planning AI system with the collision avoidance algorithm generates a traceable trajectory for the machine controller, equipped in the excavator, and yields the desired excavation volume and lead time without collision, regardless of the topographic change caused through successive excavations.
1. Original Data : Point Cloud, Bucket Position value, Hydraulic pressure
2. Training Data for ROE generation AI and waypoint generation AI