First Name
JAEMYUNG
Last Name
HUH

The increased risk to the safety of excavator personnel and difficulty in training them, combined with a manpower shortage, have led to an increased demand for machine automation. This study applies a long short-term memory algorithm for automating a bucket-tip trajectory planning AI system.
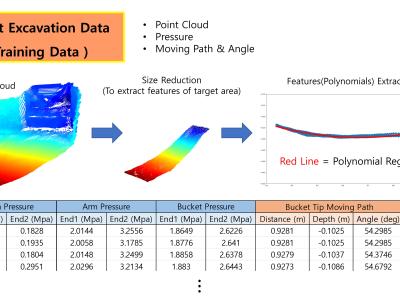
The data in this file include not only original data which is not preprocessed, but also training data to train our deep learning : bucket tip trajectory planning AI.
These csv files includes pressure, position, and angle of bucket tip, and current time, which were measured in real time excavation. Also, the point cloud is captured before each excavation.