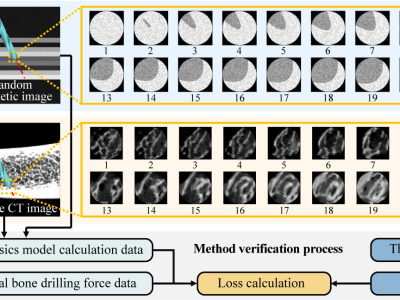
In order to train a neural network to predict bone drilling force, we build this dataset. The force data in this dataset come from two sources. The first source is the physics model-calculated force data obtained based on physical cutting laws validated by researchers in this field. Since this cutting process can be simulated by programs, the data volume is almost unlimited.
- Categories: