NJMU Bone Drilling Force Dataset
- Citation Author(s):
-
Liang Li
- Submitted by:
- liang li
- Last updated:
- DOI:
- 10.21227/4h1a-1870
 182 views
182 views
- Categories:
- Keywords:
Abstract
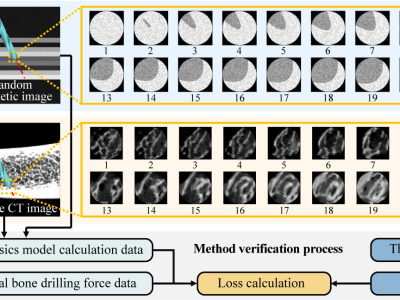
In order to train a neural network to predict bone drilling force, we build this dataset. The force data in this dataset come from two sources. The first source is the physics model-calculated force data obtained based on physical cutting laws validated by researchers in this field. Since this cutting process can be simulated by programs, the data volume is almost unlimited. The second source is sensor-recorded force data, which reflect the actual bone drill force imposed on the drill bit during operations but are limited by the utilized equipment and the complexity of experiments.
Therefore, we generate a large scale synthetic dataset (Synthetic dataset.zip) with program generated images and physics model-calculated force data to pretrain the cutting physics model-guided network. Then, we build a real bone dataset with bovine bone CT images and sensor-recorded force data to fine-tune the previous network and train the PFPP and IRTP network to predict sensor-recorded force values.
The synthetic dataset contains 985,356 images from 600 virtual drilling paths. Each path is set with specific drilling conditions parameters (drill_geometry_working_station.mat). Each image is paired with the radial force X, radial force Y, thrust force, and torque calculated by the physics model (data_model_norm/unnorm.csv). The real bone dataset contains 9162 images from 14 drilling paths from 3 bovine bones. Each path is set with specific drilling conditions parameters. Each image is paired with the radial force X, radial force Y, thrust force, and torque calculated by the physics model and thrust force measured by force sensor (data_forcesensor_norm/unnorm.csv).
Instructions:
The synthetic dataset contains 985,356 images (imagexxxx.jpg) from 600 virtual drilling paths for pretraining the cutting physics model-guided network. We also offer test sets for testing the network’s robustness to fit the physics model under different drilling conditions and image gray levels. Each path is set with specific drilling conditions parameters (drill_geometry_working_station.mat). Each image is paired with the radial force X, radial force Y, thrust force, and torque calculated by the physics model (data_model_norm/unnorm.csv).
The real bone dataset contains 9162 images from 14 drilling paths from 3 bovine bones. Each path is set with specific drilling conditions parameters. Each image is paired with the radial force X, radial force Y, thrust force, and torque calculated by the physics model (data_model_norm/unnorm.csv) and thrust force measured by force sensor (data_forcesensor_norm/unnorm.csv).
Each row in a csv file contains the force labels corresponding to a image jpg in the same file folder of a drilling path in order. The first four columns in csv are radial force X, radial force Y, thrust force, and torque, respectively. Images and drilling conditions in the dataset have been preprocessd. The drilling conditions data (drill_geometry_working_station.mat) contains 9 channels of drilling condition matrix with the size 99*99 (the same size with image files). The 9 channels are corresponding to the following data:
1: Cartesian coordinates X of pixels
2: Cartesian coordinates Y of pixels
3: Cartesian coordinates Z of pixels
4: Polar coordinates θ of pixels
5: Polar coordinates R of pixels
6: The same with the 3th channel
7: The cutting edge type where pixels locate in. 0 is chisel edge, 1 is major edge, 2 is the area outside the cutting edge
8: Spindle speed of pixels
9: Feed rate of pixels