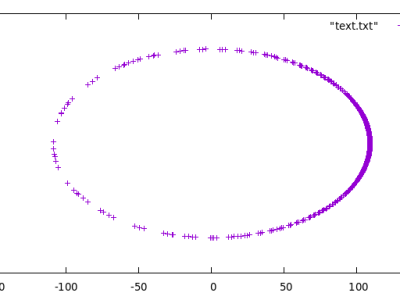
The odometric model is simulated herein. We described the trajectory of such one odometric model, with the delta of the heading angle given as one parameter of the simulation. The iterations show that the trajectory is well in the continuity of the variations of the heading angle. Moreover the distance in X and in Y are shown for the vehicle to be driven in the trajectory of the odometric model. Moreover I have displayed the linear approximation then. This is a tiny approximation made based upon the equations of the odometric model.
- Categories: