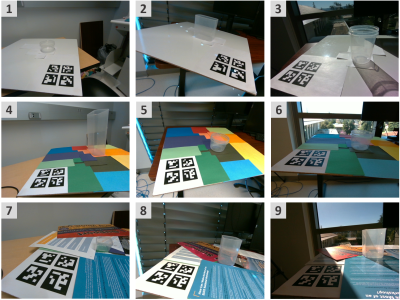
This dataset is specifically designed for the recognition and localization of electric vehicle (EV) charging ports using point cloud data, rather than traditional image-based methods. It includes raw point cloud data collected from advanced sensing technologies such as LiDAR or depth cameras, along with detailed experimental records that encompass sensor parameters, pose annotations, and environmental variables.
- Categories: