swarm robotics experimental data
- Citation Author(s):
-
USST 906
- Submitted by:
- jay Lin
- Last updated:
- DOI:
- 10.21227/ebzh-dh30
 222 views
222 views
- Categories:
- Keywords:
Abstract
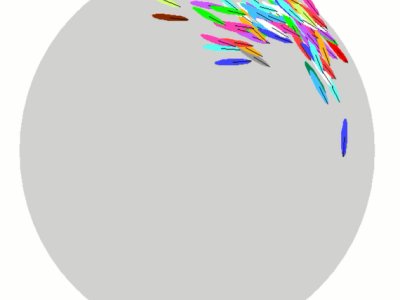
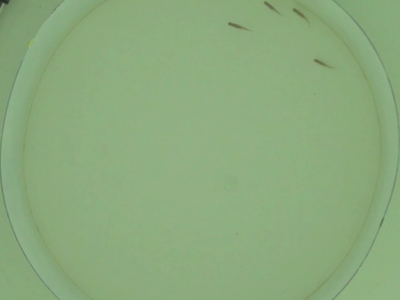
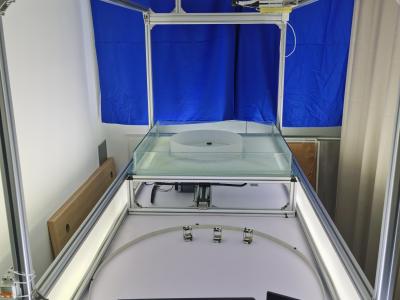
Collective intelligence in biological groups can be employed to inspire the control of artificial complex systems, such as swarm robotics. However, modeling for the social interactions between individuals is still a challenging task. Without loss of generality, we propose a deep attention network model that incorporates the principles of biological Hard Attention mechanisms, that means an individual only pay attention to one or two neighbors for collective motion decision in large group. The model is trained by the collective movement data of 5 rummy-nose tetra fish (Hemigrammus rhodostomus). The structure of the model enforces individual agents to consider information from at most two neighboring agents. Meanwhile, the model can reveal hidden locations, where highly influential neighbors frequently appear. These findings demonstrate that the proposed Hard Attention model aligns with the information processing mechanisms, which is observed in fish schooling. Experimental results indicate that the model exhibits a strong ability to decouple sparse information for collective movement with robust metrics. It can also perform excellent scalability in different group sizes. The simulation and real robots experiment show that the model provides a powerful tool for analyzing multi-level behaviors in complex systems and offers significant insights for the distributed control of swarm robotics.
Instructions:
100 robot motion indicators