Datasets
Standard Dataset
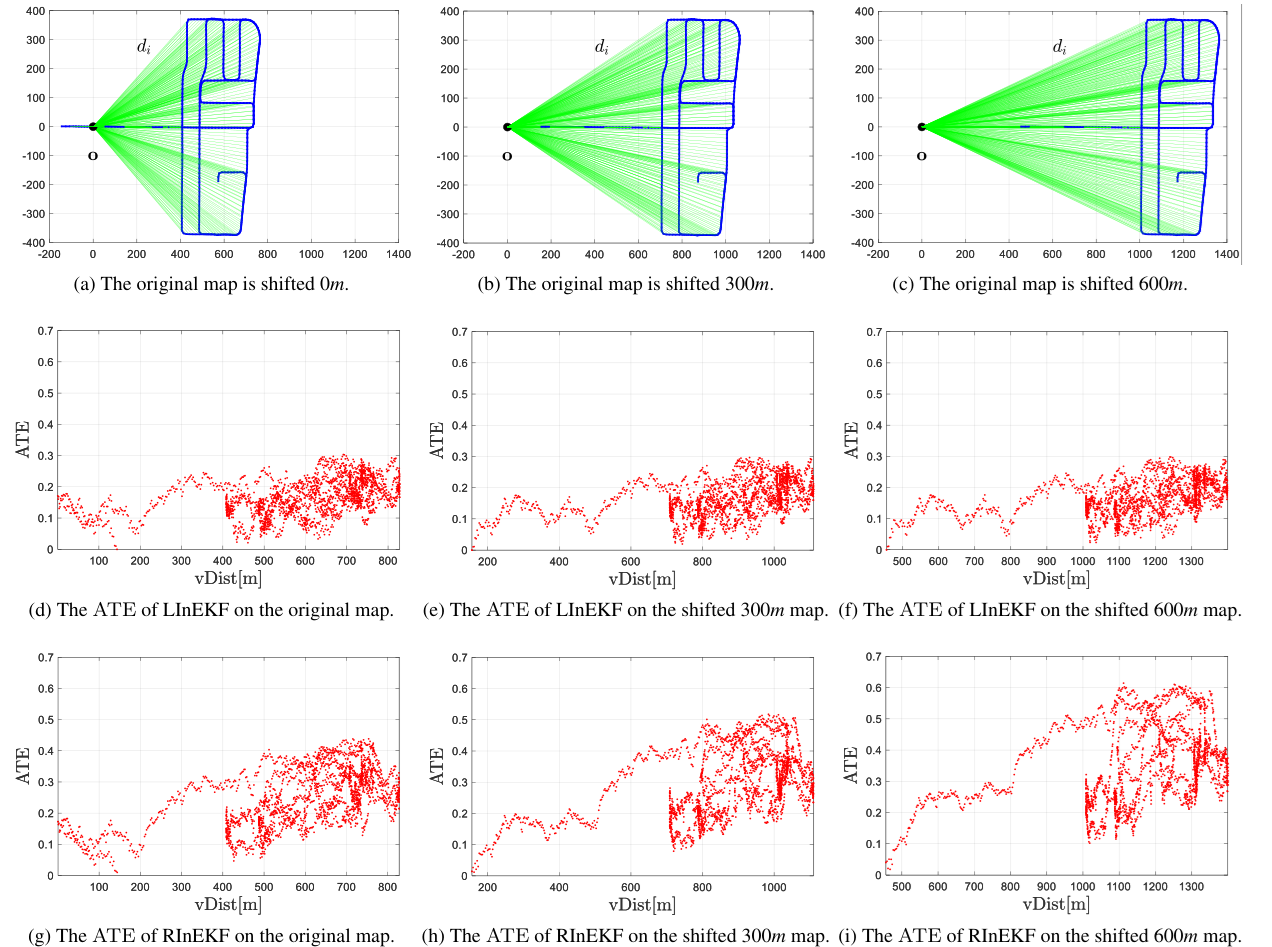
Map-aided localization Dataset and Code for Left and Right InEKF Evaluation
- Citation Author(s):
- Submitted by:
- Tao Z.X.
- Last updated:
- Wed, 07/24/2024 - 09:47
- DOI:
- 10.21227/5vef-t322
- License:
 142 Views
142 Views- Categories:
- Keywords:
Abstract
This dataset is employed to evaluate the map-aided localization method based on the Left InEKF and Right InEKF. The dataset contains three main test datasets (two public datasets KITTI and Apollo-SouthBay , and one our collected dataset iVFC-Sudoku), each of which includes 3D point cloud maps, odometry pose, ground truth, and real-time 3D point cloud observations, where the KITTI and Apollo-SouthBay datasets can be download in https://www.cvlibs.net/datasets/kitti/ and https://apollo.auto/southbay.html, respectively.
This dataset is employed to evaluate the map-aided localization method based on the Left InEKF and Right InEKF.
On the kitti dataset (subdataset - Seq 00)
-- matlab code : DemoKitSeq00DistE.m
-- source file: KitLocFastData (not appeared in this dataset, please download on https://www.cvlibs.net/datasets/kitti/)
: KittiMapRoot (3D point cloud map, groundtruth and Odometry information)
On the Apollo-SouthBay dataset (subdataset - ColumbiaPark)
-- matlab code : DemoColumbiaPark.m
-- source file: ColumbiaParkLocD (not appeared in this dataset, please download on https://apollo.auto/southbay.html)
: ColumbiaParkMap (3D point cloud map, groundtruth and Odometry information)
On the iVPC-Sudoku dataset (subdataset - LongTerm02)
-- matlab code : DemoLongTerm02.m
-- source file: LongTerm02LocD
: SudokuMapRoot (3D point cloud map, groundtruth and Odometry information)
Other file folders are used for
-- common function: Common
-- evaluation function: Evaluation
-- invariant function: InvariantKF (Left InEKF and Right EKF)
-- 3d registrations: GaborCode (Part of the code is sourced from the website https://github.com/DrGabor/LiDAR)





