Intelligent 5G networks for BLOS UAV networking
- Citation Author(s):
-
Matteo BordinPietro Brach del PreverSalvatore D'Oro
- Submitted by:
- Matteo Bordin
- Last updated:
- DOI:
- 10.21227/85ra-py52
- Data Format:
 641 views
641 views
- Categories:
- Keywords:
Abstract
Although Unmanned Aerial Vehicles (UAVs) have long been recognized as systems to effectively deliver advanced and innovative services, their practical application to Beyond Line-of-Sight (BLOS) use cases is still largely missing due to safety concerns and regulations. Indeed, BLOS applications for UAVs require a reliable infrastructure that is capable of ensuring ubiquitous connectivity, low latency, and high data rates. Despite 5G networks promising to satisfy those requirements, they are not exclusively serving UAVs, but a variety of users and sub-systems that despite sharing the same radio resources (e.g., spectrum) might have opposing demand requirements. How to achieve such coexistence is still unclear, which makes 5G networks for BLOS UAV applications still unreliable.
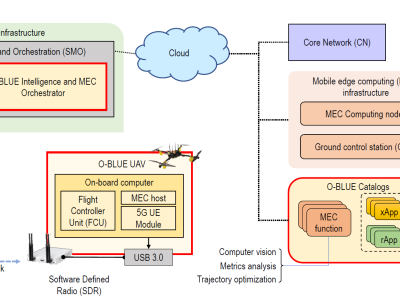
The goal of this project is to advance 5G technologies for BLOS UAV applications by designing and developing O-BLUE, a framework that combines AI, Open RAN architectures and edge computing to enable and support BLOS UAV applications over 5G networks.
In O-BLUE, UAVs are connected to Ground Control Stations (GCS) via the 5G infrastructure. Moreover, by building on top of the Open RAN architecture proposed by the O-RAN Alliance, O-BLUE leverages Radio Access Network (RAN) Intelligent Controllers (RICs) and AI to adapt 5G network functionalities and parameters according to UAV mobility patterns and changing traffic and channel conditions, so as to ensure stable and low-latency communications between UAVs and GCS.
Our goal is to design, implement and experimentally validate O-BLUE by leveraging the variety of experimental platforms that our team has access to, and eventually disseminate our findings to the community and make publicly available datasets and open-source components developed within the context of this project.
Instructions:
The zip folder contains a PDF file of the concept idea to develop





m