Datasets
Standard Dataset
DeepAoA+ Traces
- Citation Author(s):
- Submitted by:
- Facheng Hu
- Last updated:
- Thu, 08/15/2024 - 12:46
- DOI:
- 10.21227/452q-hk60
- Data Format:
- Research Article Link:
- License:
 431 Views
431 Views- Categories:
- Keywords:
Abstract
Relative direction estimation among neighboring vehicles in urban environments is essential to a wide variety
of driving safety applications. To obtain accurate direction information solely from vehicle-to-vehicle (V2V) communications is desirable but very challenging due to enormous multipath effects. In this paper, we propose an online cross-domain vehicular relative direction estimation method, called DeepAoA+, based on a domain adaptive deep learning method. More specifically, the channel state information (CSI) is estimated from a set of synchronized receiving radios at a receiver vehicle. By taking the CSI phase difference between a pair of such radios, CSI phase errors in the baseband can be effectively eliminated, which makes a compelling feature to represent the direction of incident radio frequency (RF) signals and the dynamic channel characteristics. Moreover, to conquer the non-i.i.d (independent and identically distributed) problem caused by dynamic environments, DeepAoA+ discovers latent domains in the CSI
phase difference dataset. For each identified domain, a domain specific model is trained to estimate the Angle-of-Arrival (AoA) of incoming signals. To this end, a framework based on an expectation-maximization (EM) algorithm is proposed to obtain domain partitions considering downstream AoA estimation tasks. Furthermore, a pre-training technique is used to enhance the robustness of AoA estimation with misclassified test samples. We implement a prototype of DeepAoA+, using four synchronized Universal Software Radio Peripherals (USRPs) from various scenarios, and conduct extensive real-world experiments. The results demonstrate that DeepAoA+ can achieve the best AoA estimation with low latency.
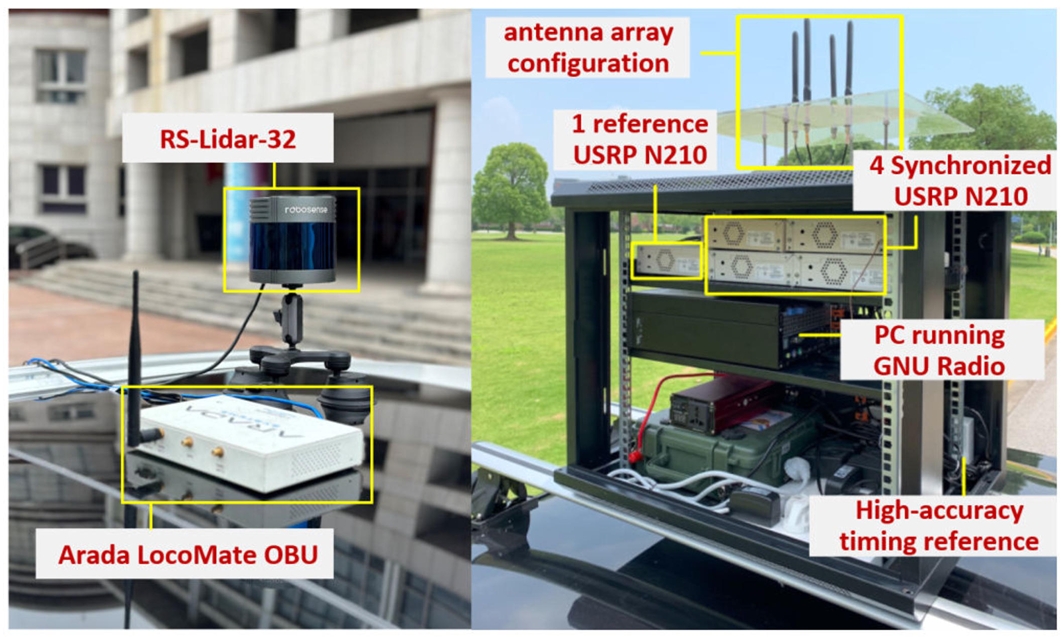
As illustrated in the Cover Image, we deploy two experimental vehicles, i.e., one transmitter (Tx) vehicle and one receiver (Rx) vehicle. For the Tx vehicle, an off-the-shelf Arada Lo coMate OBU is mounted on the roof of the vehicle, which implements IEEE 802.11p and IEEE 1609 standards and periodically sends ten WSM packets per second. For the Rx vehicle, five USRP N210s constitute a set of four synchronized radios with omnidirectional antennas, forming a uniform linear array (ULA) of the small aperture by placing antennas with a displacement of half of the wavelength = 5093cm of the central frequency 5.89GHz. Specifically, four Rx N210s with CBX daughterboards are synchronized with an Ettus Octo Clock-G and their initial PLL phase differences are calibrated with the fifth N210. All five USRPs are controlled by a PC running GNU Radio. We revise the IEEE 802.11p transceiver f low graph to detect 802.11p packets and extract CSI from all receiving USRPs. In addition, each vehicle is equipped with a Robosense 32-line LiDAR
We collect a CSI trace of V2V communication in four typi cal vehicular scenarios, i.e., a rural region with no surrounding buildings and passing vehicles, a parking lot with many parked vehicles, the urban surface road, and the highway, for two hours per day from July 6 to July 22 in the year 2022 in Shanghai. Specifically, both the rural region and the parking lot scenarios are static, where the Rx vehicle is parked at a fixed position and the Tx vehicle passes the receiver vehicle slowly while transmitting packets. In contrast, both the surface road and the highway scenarios are dynamic, where both vehicles, one in front and one behind, move in adjacent lanes with various surrounding traffic conditions. In all scenarios, the Tx vehicle keeps sending ten WSM packets per second while the Rx vehicle keeps extracting CSI from each of its four radios and recording the signal-to-noise ratio (SNR) at the same time. In addition, the two vehicles also record LiDAR point clouds for obtaining the ground truth of the AoA and the distance between both vehicles. We remove samples without ground truth due to the obstruction of passing vehicles. As a result, we obtain a CSI trace of 51,477 samples, denoted as T , with each sample consisting of a set of four CSI estimates extracted from the receiver’s antenna array. The numbers of samples in the rural region, the parking lot, the surface road, and the highway scenarios are 17,508, 8,307, 17,409, and 8,253, respectively.





