Autonomous Driving
- Citation Author(s):
-
Ma Zhanwu
- Submitted by:
- Ma Zhanwu
- Last updated:
- DOI:
- 10.21227/km1s-sn86
- Research Article Link:
 146 views
146 views
- Categories:
- Keywords:
Abstract
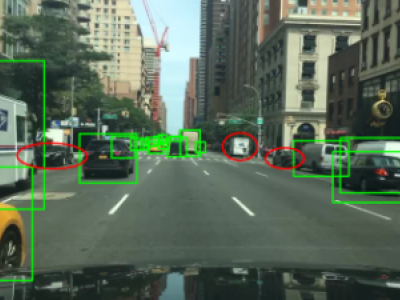
To address common issues in intelligent driving, such as small object missed detection, false detection, and edge segmentation errors, this paper optimizes the YOLOP (You Only Look Once for Panoptic Driving Perception) network and proposes a multi-task perception algorithm based on a MKHA (Multi-Kernel Hybrid Attention) mechanism, named MKHA-YOLOP. First, the convolutional layers in the backbone network are replaced with RAFConv (Receptive Field Attention Convolutions), which dynamically allocate kernel weights to enhance feature extraction based on the importance of image features. Additionally, the BottleneckCSP (Cross-Stage Partial Network) module is replaced with the C2f module to improve computational efficiency while ensuring effective feature transmission. Second, a MKHA mechanism is introduced and integrated with a FPN (Feature Pyramid Network) to build the MKHA-FPN extraction network, which is more suited for multi-task perception. Finally, an uncertainty-weighted loss function is incorporated to significantly enhance detection and segmentation performance. Experimental results on the BDD100K open-source dataset and the experimental platform demonstrate that the optimized model outperforms other multi-task and even single-task models in autonomous driving perception while maintaining high real-time inference performance.
Instructions:
图像处理






