First Name
Ziqi
Last Name
Wang
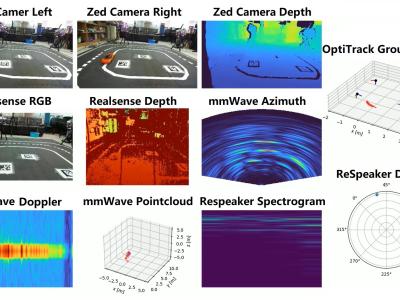
Multimodal sensor fusion has been widely adopted in constructing scene understanding, perception, and planning for intelligent robotic systems. One of the critical tasks in this field is geospatial tracking, i.e., constantly detecting and locating objects moving across a scene. Successful development of multimodal sensor fusion tracking algorithms relies on large multimodal datasets where common modalities exist and are time-aligned, and such datasets are not readily available.