First Name
Yiran
Last Name
Wei
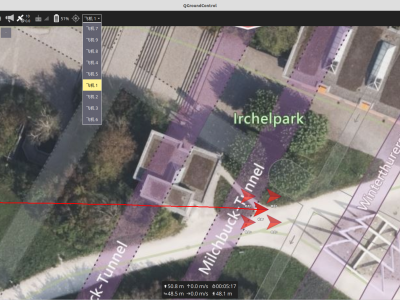
The visual simulation environment of CRA is constructed in ROS and Gazebo environment. The visual aircraft model in the simulation environment is established as controlled objects according to the kinematic characteristics of the CRA. The software code of UAV flight control is completed based on PX4 firmware, QGroundControl (QGC for short), and Gazebo, which are used to conduct SITL simulation of the customized model REF _Ref183081178 \r \h . QGroundControl ground station is used to display the flight status and trajectories of CRAs.