3D Perception
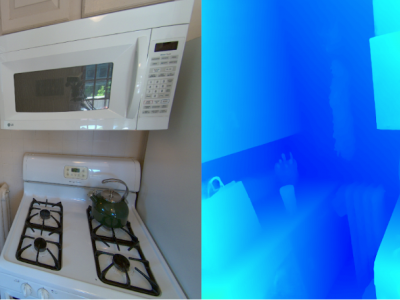
We present a passive stereo depth system that produces dense and accurate point clouds optimized for human environments, including dark, textureless, thin, reflective and specular surfaces and objects, at 2560x2048 resolution, with 384 disparities, in 30 ms. The system consists of an algorithm combining learned stereo matching with engineered filtering, a training and data-mixing methodology, and a sensor hardware design. Our architecture is 15x faster than approaches that perform similarly on the Middlebury and Flying Things Stereo Benchmarks.
- Categories:
 139 Views
139 Views