Soft robot
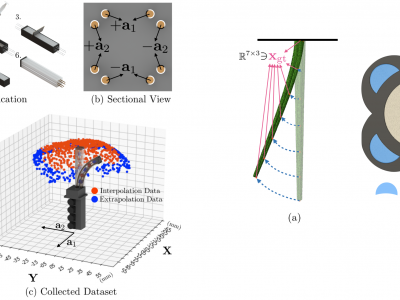
Soft robots are a promising area of research due to their potential use in various applications. Learning the kinematics of soft robots is crucial for their advancement and application. This dataset is designed to provide training data for the development of machine learning models that can learn the kinematics of soft robots with different actuation types. The dataset includes the positional data of three soft robots, specifically the simulated pneumatic soft robot, simulated tendon-driven soft robot, and real-world tendon-driven soft robot.
- Categories:
 79 Views
79 Views