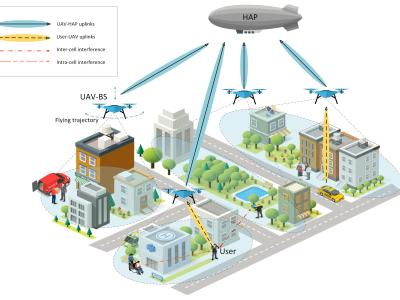
In this paper, we develop a hierarchical aerial computing framework composed of high altitude platform (HAP) and unmanned aerial vehicles (UAVs) to compute the fully offloaded tasks of terrestrial mobile users which are connected through an uplink non-orthogonal multiple access (UL-NOMA).
- Categories:
