GA-SA-3Opt
- Citation Author(s):
-
jinghao yuan
- Submitted by:
- jianghao yuan
- Last updated:
- DOI:
- 10.21227/rrrv-wf13
- Research Article Link:
- Links:
 68 views
68 views
- Categories:
- Keywords:
Abstract
To evaluate the efficiency of the GA-SA3-opt algorithm, problems from the TSPLIB standard library are selected for simulation and testing. The computational environment is configured with an Intel i5-10200H 2.60GHz CPU and MATLAB 9.0.0.341360 (R2016a) 64-bit.
First, the convergence speed of the algorithms is tested using the eil101 problem from TSPLIB. The optimal paths for each algorithm applied to the Eil101 problem are shown in figure 9.
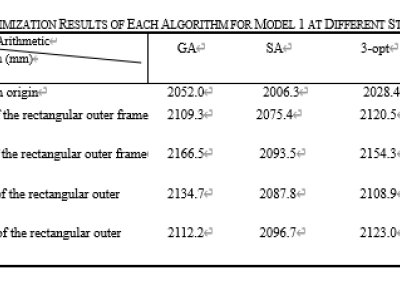
The machining starting point is located at the centre and four corners of the rectangular outer frame. The GA, SA, 3-opt, and GASA3-opt algorithms are applied for path optimization, and the results are presented in Table 4. In this paper, the machining starting point is at the origin of the workpiece coordinate system. The optimization results of the algorithms are shown in Figure. 11.
Figure and table are in this paper.
Instructions:
To evaluate the efficiency of the GA-SA3-opt algorithm, problems from the TSPLIB standard library are selected for simulation and testing. The computational environment is configured with an Intel i5-10200H 2.60GHz CPU and MATLAB 9.0.0.341360 (R2016a) 64-bit.
First, the convergence speed of the algorithms is tested using the eil101 problem from TSPLIB. The optimal paths for each algorithm applied to the Eil101 problem are shown in figure 9.
The machining starting point is located at the centre and four corners of the rectangular outer frame. The GA, SA, 3-opt, and GASA3-opt algorithms are applied for path optimization, and the results are presented in Table 4. In this paper, the machining starting point is at the origin of the workpiece coordinate system. The optimization results of the algorithms are shown in Figure. 11.
Figure and table are in this paper.







1