The data sets of oscillator-based hybrid gait phase estimation method for hip assistive exoskeleton
- Citation Author(s):
-
MING-HANG TAN
- Submitted by:
- Tan TsundereKike
- Last updated:
- DOI:
- 10.21227/hv2m-6177
 126 views
126 views
- Categories:
Abstract
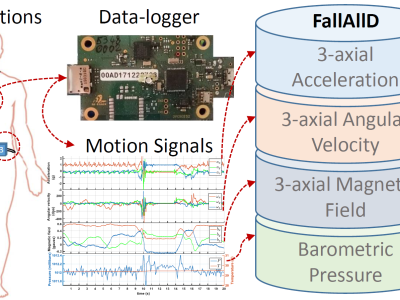
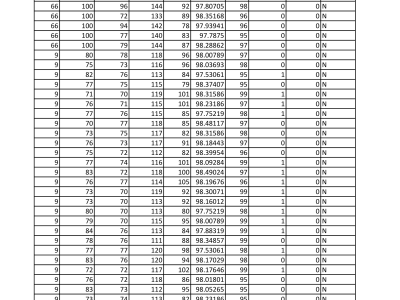
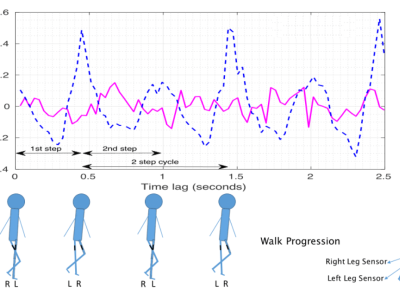
These data sets are from the experimental part of the paper, mainly including hip angle obtained by IMU, plantar pressure obtained by FSR, gait division algorithm results, oscillator phase and so on.
Instructions:
This data set can be opened by MATLAB, VScode and other tools. For example, if it is opened through MATLAB, please import the *.txt file according to the MATLAB text import command.