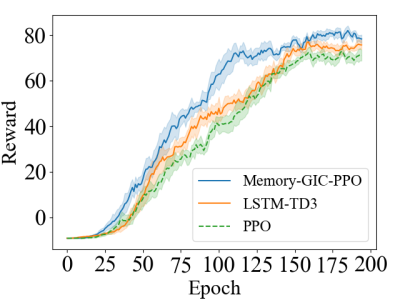
This study proposes a more competitive and sample-efficient algorithm: Memory-GIC-PPO, specifically to address POMDPs in UAV path planning. The effectiveness of the proposed algorithm is thoroughly evaluated through simulations conducted on the Airsim platform. The results convincingly demonstrate that Memory-GIC-PPO enables the UAV to achieve optimal path planning in complex environments and outperforms the benchmark algorithms in terms of sampling efficiency and success rates.
- Categories: