Artificial Intelligence
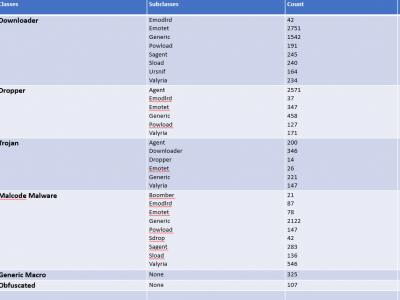
Microsoft contains a productive tool known as MS Office but the inclusion of VBA Macros inside the MS Office for automation purposes makes it a way for attackers to perform malicious activities. To get an up-to-date dataset, the research regarding VBA macros is still working to find efficient ways to detect it. To perform analysis, the dataset is required which is publically harder to find. To overcome this issue, a dataset is created from VirusTotal, VirusShare, Zenodo, Malware Bazaar, Github and InQuest Labs.
- Categories:
 1042 Views
1042 Views
The Sketchy images refer to hand-drawn drawings, while SCIST are those with unclear or weak semantic information, represent a distinctive cases from natural scenes.The primary objective of this dataset is to facilitate the style transfer, whether originating from manual sketches or digital renderings, into enriched and artistically embellished counterparts through the utilization of software.
- Categories:
169 Views
- Categories:
364 Views
This dataset acompanies our article titled "Insights into traditional Large Deformation Diffeomorphic Metric Mapping and unsupervised deep-learning for diffeomorphic registration and their evaluation", Computers in Biology and Medicine, 2024. This paper explores the connections between traditional Large Deformation Diffeomorphic Metric Mapping methods and unsupervised deep-learning approaches for non-rigid registration, particularly emphasizing diffeomorphic registration.
- Categories:
245 Views
Dataset of images of dragon fruit plants, collected from different media and taken from a dragon fruit field in Rio Branco, Brazil, with a total of 600 images classified among 300 photos of sick plants, with fish eyes among others and 300 photos of healthy plants. For many of the photos, a simple smartphone
camera was used to capture the images.
- Categories:
894 Views
Existing datasets of infrared and visible images only contain few extreme scenes, we construct a dataset of images with haze based on the M3FD dataset. We pick 450 aligned image pairs from M3FD dataset and synthesize hazy visible images using the ASM. Due to the unique imaging principle of infrared images, rarely affected by haze, there is no need to do additional process for infrared images. Finally, a dataset named MHS has been released, which contains 450 pairs of images in hazy conditions.
- Categories:
29 Views
Current neural network solutions for channel estimation are frequently tested by training and testing on one example channel or similar channels. However, data-driven algorithms often degrade significantly on other channels which they are not trained on, because they cannot extrapolate their training knowledge. Online training can fine-tune the offline-trained neural networks to compensate for this degradation, but its feasibility is challenged by the tremendous computational resources required.
- Categories:
142 Views
We introduce an online-offline Iraquian hand-drawing dataset for early Parkinson’s disease detection, exclusively collected using smartphones, thus eliminating the need for specialized equipment like digitizing tablets and pens. Our dataset comprises data from 30 healthy individuals (17 men, 13 women) with an average age of 56 years (SD = 6.12) and 30 PD patients (23 men, 7 women) with an average age of 60 years (SD = 4.91), gathered at Marjan Hospital in Hilla, Babil Governorate, Iraq.
- Categories:
440 Views
This dataset utilizes Asus RT-AC86U routers and nexmon tools to collect Channel State Information (CSI) data in a 7 by 5 meters meeting room furnished with typical furniture including a conference table, several chairs, and a locker. The data, stored in .pcap format, is accompanied by processing code on GitHub, enabling parsing into CSI matrix data stored in .npy format. Each CSI matrix contains amplitude and processed phase values for four channels, encompassing data from both external and internal antennas within the room.
- Categories:
330 Views
SETCD (Satellite and ERA5-based Tropical Cyclone Dataset), a comprehensive dataset encompassing satellite imagery data and ERA5 data for all TCs recorded between 1980 and 2022. Our dataset is derived from two publicly available data sources: GridSat-B1 and ERA5. To capture relevant information associated with TC, SETCD adopts the latitude and longitude positions provided by IBTrACS as the center points. The satellite data within the SETCD dataset consists of three channels from GridSat-B1: infrared, water vapor, and visible.
- Categories:
166 Views